




Crean una nueva mano robótica que identifica objetos con un solo agarre
Inspirándose en el dedo humano, investigadores del MIT han desarrollado una mano robótica con sensores táctiles capaz de identificar con precisión un objeto tras agarrarlo solo una vez.
Muchas manos robóticas colocan todos sus poderosos sensores en las yemas de los dedos, por lo que un objeto debe estar en pleno contacto con esas yemas de los dedos para ser identificado, lo que puede obligar a realizar múltiples agarres. Otros diseños utilizan sensores de menor resolución distribuidos a lo largo de todo el dedo, pero estos no capturan tantos detalles, por lo que a menudo se requieren múltiples agarres también.
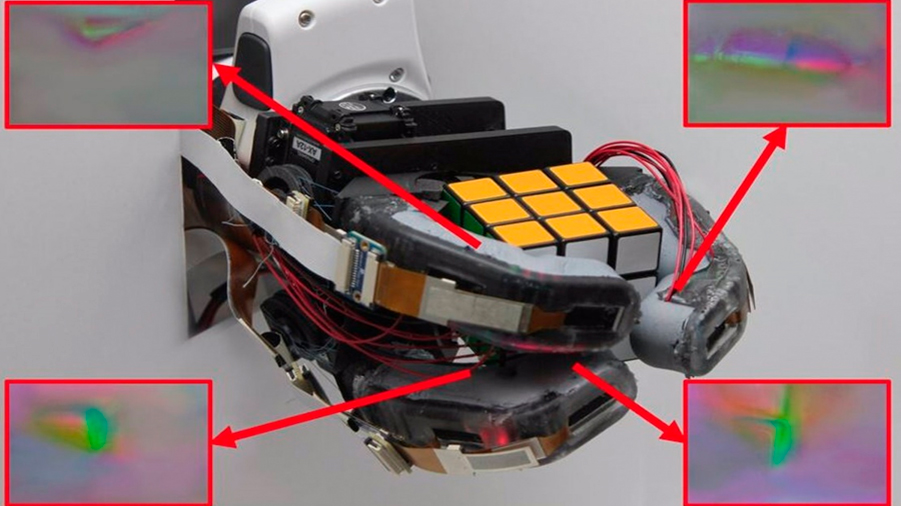
En cambio, el equipo del MIT construyó un dedo robótico con un esqueleto rígido encerrado en una capa exterior suave que tiene múltiples sensores de alta resolución incorporados debajo de su «piel» transparente. Los sensores, que utilizan una cámara y LED para recopilar información visual sobre la forma de un objeto, brindan una detección continua a lo largo de toda la longitud del dedo. Cada dedo captura datos ricos en muchas partes de un objeto simultáneamente.
Usando este diseño, los investigadores construyeron una mano robótica de tres dedos que podía identificar objetos después de un solo agarre, con una precisión de alrededor del 85 por ciento. El esqueleto rígido hace que los dedos sean lo suficientemente fuertes como para levantar un objeto pesado, como un taladro, mientras que la piel suave les permite agarrar con seguridad un objeto flexible, como una botella de agua de plástico vacía, sin aplastarlo.
Estos dedos suaves y rígidos podrían ser especialmente útiles en un robot de cuidado en el hogar diseñado para interactuar con una persona mayor. El robot podría levantar un artículo pesado de un estante con la misma mano que usa para ayudar a la persona a bañarse.
«Tener elementos blandos y rígidos es muy importante en cualquier mano, pero también lo es poder realizar una gran detección en un área realmente grande, especialmente si queremos considerar realizar tareas de manipulación muy complicadas como lo que pueden hacer nuestras propias manos. Nuestro objetivo con este trabajo fue combinar todas las cosas que hacen que nuestras manos humanas sean tan buenas en un dedo robótico que puede hacer tareas que otros dedos robóticos no pueden hacer actualmente», dice en un comunicado la estudiante graduada en ingeniería mecánica Sandra Liu, coautora principal de un trabajo de investigación en el dedo robótico.
La investigación se presenta en la Conferencia de RoboSoft en Singapur, que se celebra del 3 al 7 de abril. Ya está disponible en el servidor de preimpresión arXiv.
El dedo robótico se compone de un endoesqueleto rígido impreso en 3D que se coloca en un molde y se envuelve en una «piel» de silicona transparente. Hacer el dedo en un molde elimina la necesidad de sujetadores o adhesivos para mantener la silicona en su lugar.
Un molde con forma curva
Los investigadores diseñaron el molde con una forma curva para que los dedos robóticos estén ligeramente curvados cuando están en reposo, al igual que los dedos humanos.
«La silicona se arruga cuando se dobla, por lo que pensamos que si tenemos el dedo moldeado en esta posición curva, cuando lo curvas más para agarrar un objeto, no se producirán tantas arrugas. Las arrugas son buenas en algunos aspectos: puede ayudar a que el dedo se deslice a lo largo de las superficies con mucha suavidad y facilidad, pero no queríamos arrugas que no pudiéramos controlar», dice Liu.
El endoesqueleto de cada dedo contiene un par de sensores táctiles detallados, conocidos como sensores GelSight, incrustados en las secciones superior y media, debajo de la piel transparente. Los sensores se colocan de modo que el alcance de las cámaras se superponga ligeramente, lo que proporciona al dedo una detección continua en toda su longitud.
Usando los contornos iluminados que aparecen en la piel suave, un algoritmo realiza cálculos hacia atrás para mapear los contornos en la superficie del objeto agarrado. Los investigadores entrenaron un modelo de aprendizaje automático para identificar objetos utilizando datos de imágenes de cámara sin procesar.
Fuente: madridpress.com





