




Este robot cambia su modo de marcha con solo una fluctuación en el voltaje
Los ingenieros de la Universidad de Osaka han desarrollado un robot de cuatro piernas que puede sincronizar su desplazamiento sin usar controles especiales debido a una estructura mecánica especial. Además, para cambiar su forma de anda, solo es necesario modificar la tensión aplicada a sus extremidades. El invento se presentará en la conferencia IEEE-ROBIO 2017, en diciembre. La publicación IEEE Spectrum trata sobre ello.
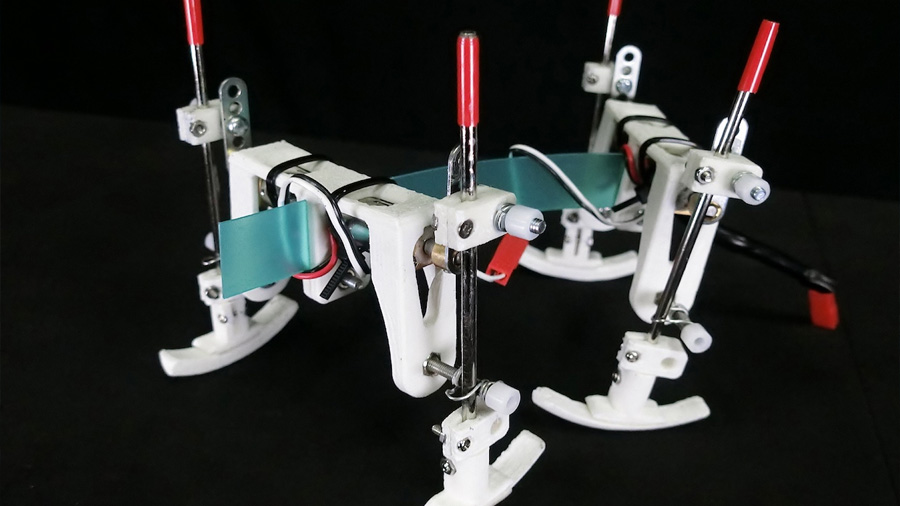
El robot cuenta con cuatro motores que, gracias a un mecanismo de manivela, levantan y bajan las piernas del robot. Los ingenieros conectaron los motores delanteros y traseros con un listón flexible, y la fuerza de motor fue elegida de tal modo que los motores desaceleran ligeramente durante el ciclo de rotación, debido a la interacción de las piernas con la superficie.
Debido a esta construcción, han logrado una sincronización espontánea de los movimientos de las piernas en poco tiempo después de encender los motores. También descubrieron que cuando varía la tensión aplicada al motor, la marcha del robot cambia: a una tensión de dos voltios y medio el robot fue a un paso en el que el movimiento de las piernas, dispuestas en diagonal, coincidieron, y con cuatro voltios el robot fue a galope.
Fuente: rpp.pe





