Mexicano, en proyecto de exploración petrolera
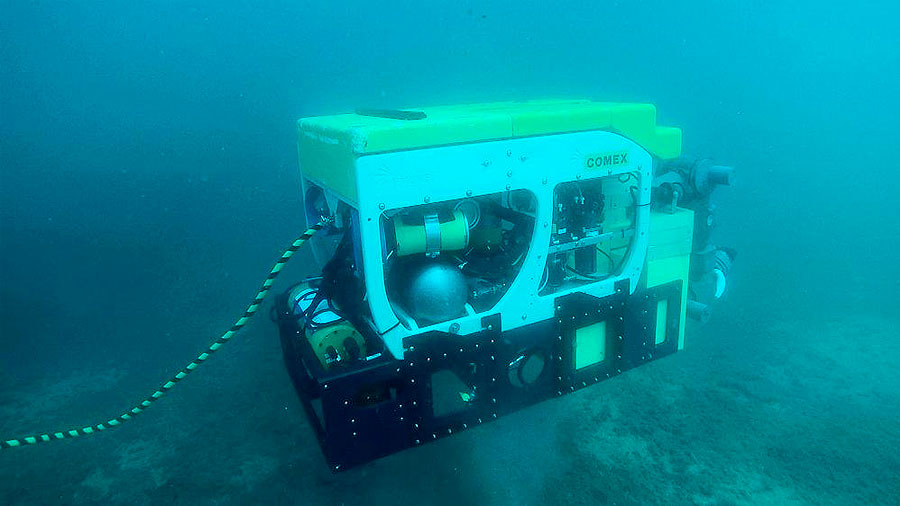
El científico mexicano, de 27 años, Arturo Gómez Chávez participa junto con expertos en robótica de siete organizaciones en Europa, así como de tres instituciones de investigación y cuatro empresas de ese continente en la operación del prototipo de Vehículo Remotamente Operado (ROV), que será utilizado en la exploración y explotación de grandes yacimientos petrolíferos en aguas ultraprofundas, donde no es posible la presencia humana.
El proyecto denominado DexROV (Dexterous ROV), que será presentado en octubre próximo en Croacia, comprende equipos robóticos submarinos controlados vía satélite y operados con un sistema exoesquelético en realidad virtual.
Arturo Gómez Chávez, agresado del Instituto Tecnológico de Estudios Superiores de Monterrey (ITESM), de la Ciudad de México, es ingeniero investigador en visión computacional de la Universidad de Jacobs en Bremen, Alemania, a donde llegó a estudiar su doctorado en 2013.
Ha participado en proyectos como CADDY-Cognitive Autonomous Diving Buddy y MORPH-Marine Robotic System off Self Organizing Logically Link Physical Nodes, ambos pertenecientes a la Unión Europea y que han permitido avanzar en procesamiento de imágenes de stereo camaras y sensores de alta definición que pueden ser operados vía satélite.
Sobre DexROV, Gómez Chávez destacó la labor realizada por varias personas e instituciones en conjunto para llevarlo a cabo en un marco para el que se consideró que la evolución de las aplicaciones robóticas para operar en lugares inhóspitos como son las profundidades oceánicas, no sólo permitirá avanzar en el desarrollo de proyectos ecológicos y arqueológicos, sino que abren expectativas para la explotación de los grandes yacimientos petroleros en el Golfo de México.
El modelo exploratorio es financiado por la Unión Europea dentro del marco de la iniciativa “Bluegrowth”, que tiene como objetivo impulsar el desarrollo de la economía en el sector marítimo.
Jeremi Gancet, coordinador del proyecto dirigido por la empresa belga Space Applications Services, explicó que con la realidad virtual se incrementan las habilidades del robot que además puede ser operado desde un centro de control desde cualquier parte del mundo, lo que abre una puerta en el avance de la tecnología para la exploración y explotación de los recursos petroleros bajo el lecho marino.
Para el desarrollo del prototipo se consideró que una presencia remota en aguas ultraprofundas no sólo facilita la logística y reduce los costos asociados a la exploración y producción de gas y petróleo, sino que elimina los elevados riesgos en seguridad que las tripulaciones enfrentan en alta mar, detalló Andreas Birk, líder del grupo de robótica de Jacobs University Bremen.
El hardware desarrollado tiene una potencia considerable de CPU para permitir el procesamiento directo de los datos enviados por el robot y convertir las imágenes 2D en mapas 3D que permitirán a los operadores vía satélite esquivar obstáculos y manipular objetos con alta precisión.
Fuente: El Universal