Lo han conseguido investigadores de Google utilizando el aprendizaje profundo por refuerzo (Deep Reinforcemente Learning)
Nunca dejarán de sorprendernos. Tanto que, a veces, llega a asustar. Investigadores de Google han creado un robot que se ha enseñado a andar a sí mismo. La inteligencia artificial no tiene límites y no cesa en su afán de demostrarlo.
La noticia, aparecida en Technology Review, del Instituto Tecnológico de Massachusetts (MIT por sus siglas en inglés) recuerda que ya existen robots o coches autónomos, pero todavía faltaba dar el salto a los robots de aprendizaje autónomo.
Para lograrlo se está usando el conocido como aprendizaje profundo por refuerzo (Deep Reinforcemente Learning), con el que, a través del método prueba-error, se consigue que los robots aprendan, sin embargo, cada vez que se caen necesitan de la ayuda de un humano.
Habitualmente, el aprendizaje de refuerzo –precisamente para evitar daños en el robot– se hace en simulación y, posteriormente, se aplican los algoritmos al mismo. Los investigadores de Google que han creado el robot que se enseña a andar decidieron probar suerte, directamente, en el mundo real.
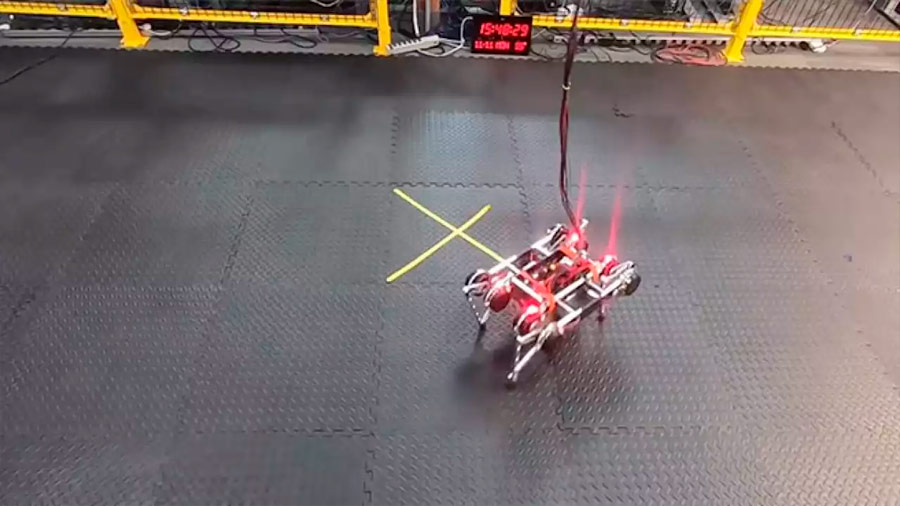
Diseñaron un algoritmo más eficiente y, aunque el resultado fue mejor, el robot seguía precisando de ayuda humana en infinidad de ocasiones. Entonces, delimitaron el terreno sobre el que actuaba el robot y también sus movimientos. Por añadidura, incluyeron otro algoritmo para ayudarlo a retroceder en caso de inevitable caída.
Y así, aplicando la inteligencia robótica, lograron que el robot aprendiera a caminar de manera autónoma. Incluso lo hizo sobre varias superficies.
Inteligencia artificial y robótica: un robot de aprendizaje autónomo
Chelsea Finn es profesora asistente en Stanford y está afiliada a Google, aunque no ha participado en este proyecto. Para ella, “eliminar a la persona del proceso es realmente difícil. Al permitir que los robots aprendan de manera más autónoma, están más cerca de poder aprender en el mundo real en el que vivimos, en lugar de en un laboratorio”.
No obstante, explica que la configuración actual está basada en un sistema de captura de movimiento sobre el robot para determinar su ubicación, algo que sería imposible en el mundo real. A corto plazo, los investigadores quieren adaptar el algoritmo a distintos robots o al aprendizaje autónomo de varios robots a la vez.
Fuente: 20minutos.es