Investigadores crean con impresión 3D un músculo robótico capaz de sudar
En la Universidad de Cornell, un grupo de investigadores ha creado un músculo robótico de sudor impreso en 3D. Al permitir que la mano del robot sude, el músculo puede regular su temperatura de la misma manera que lo hacen los mamíferos. Los investigadores explicaron que la gestión térmica es esencial para permitir que los robots trabajen durante un largo período de tiempo, sin sobrecalentarse. Según el investigador principal de este proyecto, Rob Shepherd, esta forma de gestión térmica es una solución viable gracias a la fabricación aditiva.
La investigación del equipo, denominada Transpiración Automática en Actuadores de Hidrogel Impresos en 3D, se publicó en Science Robotics y detalla el método que permite que el músculo robótico sude. De hecho, si los motores de alta densidad de torsión y los motores exotérmicos que alimentan un robot se sobrecalientan, el robot dejará de funcionar. Esto es aún más un problema con los robots blandos que están hechos de materiales sintéticos. Entonces, ¿por qué no inspirarse en los mamíferos y permitir que la mano del robot sude?
Uno de los científicos de la investigación explica: “La capacidad de transpirar es una de las características más notables de los humanos. La sudoración aprovecha la pérdida de agua evaporada para disipar rápidamente el calor, y puede enfriarse por debajo de la temperatura ambiente. Entonces, como suele ser el caso, la biología nos brindó una excelente guía como ingenieros”.
La fabricación aditiva del músculo robótico
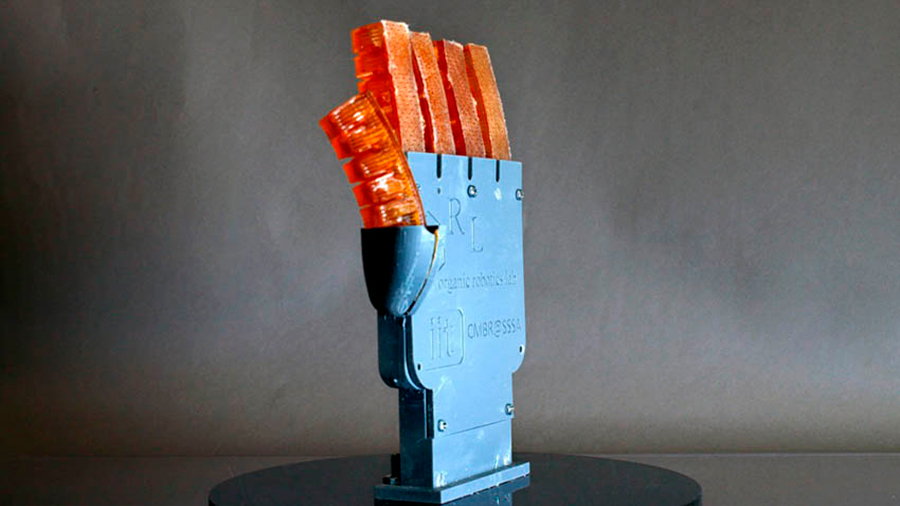
El equipo de científicos utilizó la estereolitografía multimaterial, haciendo uso de luz para establecer la forma del robot capa por capa. Para esto, el equipo tuvo que desarrollar los materiales de nanopolímeros necesarios. De hecho, fabricaron actuadores en forma de dedo compuestos por dos materiales de hidrogel que pueden retener agua y responder a la temperatura; en concreto, la capa base reacciona a temperaturas superiores a 30°C encogiéndose. Cuando esto sucede, el agua se exprime en otra capa que está perforada con pequeños poros. Estos poros también son sensibles al mismo rango de temperatura, por lo tanto, se dilatan y dejan escapar el agua con el calor, y se cierran cuando la temperatura cae por debajo de 30°C.
El equipo descubrió que este proceso era en realidad tres veces más eficiente que en humanos. El co-autor principal de la investigación, T.J. Wallin explica: «La mejor parte de esta estrategia sintética es que el rendimiento de regulación térmica se basa en el material mismo. No necesitábamos tener sensores u otros componentes para controlar la tasa de sudoración. Cuando la temperatura local aumentó por encima de la transición, los poros simplemente se abrían y cerraban por sí solos».
Estos actuadores en forma de dedo se agregaron a una mano de robot que podía agarrar y levantar objetos. Una cosa a tener en cuenta es que estos dedos podrían dificultar la movilidad del robot. Si bien el agua puede hacer que la mano esté resbaladiza, las modificaciones en la textura del hidrogel podrían compensarlo. Otra cosa a considerar es que el robot necesitará ser abastecido con agua si la pierde, de la misma manera que nosotros. Rob Shepherd agregó: «Creo que el futuro de hacer estos materiales y robots más análogos biológicamente dependerá de la composición del material».
El proceso capa por capa de la fabricación aditiva fue esencial para crear estos actuadores de dedo. Shepherd concluyó: «Esto plantea un punto de investigación multidisciplinaria en esta área, donde realmente ningún grupo tiene todas las respuestas».
Fuente: www.3dnatives.com