Una abeja robótica operada por “músculos eléctricos” puede volar y estrellarse sin romperse
Ingenieros estadounidenses crearon un robot volador en miniatura que pesa 0,66 miligramos, capaz de realizar un vuelo largo y controlado. Está equipado con cuatro pares de alas, accionadas por actuadores, que se contraen bajo la influencia de un campo eléctrico. El artículo sobre el robot ha sido publicado en Nature.
En los últimos años, diferentes grupos de ingenieros han estado desarrollando microrobots, que generalmente tienen una masa de menos de un gramo. En el nivel actual de desarrollo tecnológico, esto es una tarea extremadamente difícil, porque se debe combinar un motor, un tablero de control, una fuente de energía o un sistema externo de recepción de energía en un dispositivo muy pequeño.
Si los ingenieros asumen el desarrollo de un microrobot volador, entonces esta tarea se vuelve aún más difícil, ya que esto crea un límite de peso, así como la necesidad de actuadores más rápidos y livianos. Ya existen prototipos de abejas robóticas que pesan varios cientos de miligramos, y en desarrollos recientes sus capacidades han crecido significativamente.
Microrobot volador
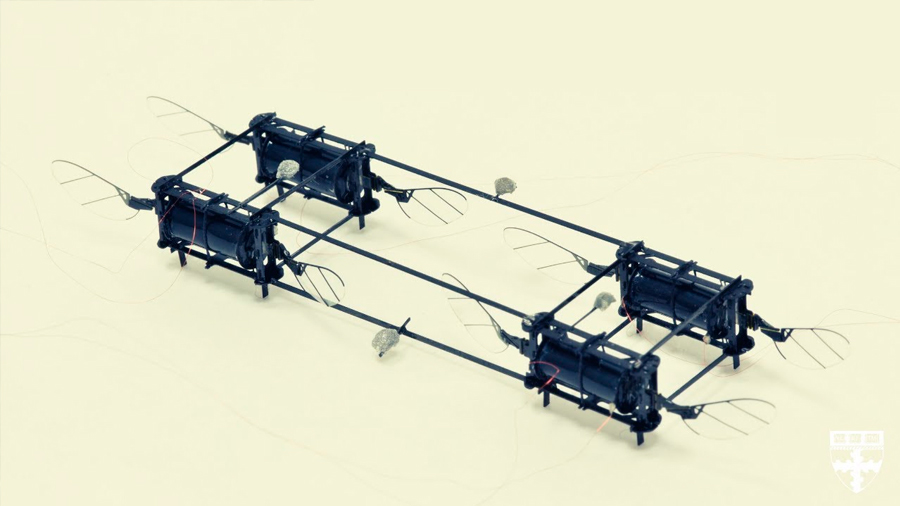
A partir de estos elementos básicos con dos alas, los ingenieros ensamblaron varios prototipos que tenían de dos a ocho alas. El más grande de ellos tiene 8 alas y una masa de 660 miligramos. Su característica principal es que una cantidad de elementos controlados independientemente le permite al robot mantener su posición y girar.
Todos estos robots usan actuadores piezoeléctricos, los cuales son bastante convenientes debido a su bajo tamaño y peso, pero tienen una limitada resistencia al impacto. Y esto es importante, dado que estos robots tienen vuelos bastante inestables. Ahora, los ingenieros dirigidos por Robert Wood de la Universidad de Harvard han mostrado una abeja robótica que utiliza actuadores dieléctricos suaves.
El equipo creó un elemento básico que consta de un actuador cilíndrico y dos alas en los extremos. Se fijan simultáneamente al actuador y al marco, de modo que cuando el actuador se contrae, las alas se mueven en una dirección y, al expandirse, en la otra. Los actuadores consisten en un elastómero dieléctrico, que cambia de forma bajo la influencia de un campo eléctrico. Durante los experimentos, el actuador funcionó a un voltaje de 800 a 1400 voltios.
Los autores demostraron experimentalmente que los robots creados por ellos pueden chocar con paredes u otros robots sin dañar las alas y otros elementos. Además, pueden detectar una colisión en una etapa temprana mediante el seguimiento de los parámetros del actuador.
El año pasado Rolls-Royce presentó un proyecto de microrobots para el diagnóstico y reparación de motores de aviones desde el interior. Y seis meses después, ingenieros estadounidenses mostraron un prototipo funcional de un microrobot, que logró caminar en un motor de avión en posición invertida gracias a que sus patas se adhirieron a la superficie con la ayuda de electroadhesión.
Fuente: nmas1.org





