Un robot que distingue movimientos musculares puede trabajar ‘hombro a hombro’ con humanos
Ingenieros estadounidenses desarrollaron un robot que puede trabajar efectivamente con humanos gracias a su sensible sistema de control de actividad muscular. Según los autores del artículo que se presentará en la conferencia robótica ICRA 2019, gracias a sus características, el robot será capaz de sincronizar sus movimientos con los de una persona.
Cómo podemos trabajar juntos con robots
La industria robótica está interesada en desarrollar no solo robots industriales, sino también autómatas que interactúen con humanos. Para trabajar junto con personas un robot debe tener varias cualidades, por ejemplo, vigilar los objetos que tiene a su alrededor y saber evitar la colisión o suavizarla si es inevitable. También debe comprender las intenciones de la persona con la cual trabaja. Es decir, puede desempeñar un papel un papel de apoyo y darle al su compañero las herramientas. O puede, al revés, participar en pie de igualdad, ayudando a mantener un objeto grande al otro lado de compañero. Normalmente para cumplir esos objetivos el robot vigila los movimientos de su compañero, observando los objetos o utilizando la visión artificial.
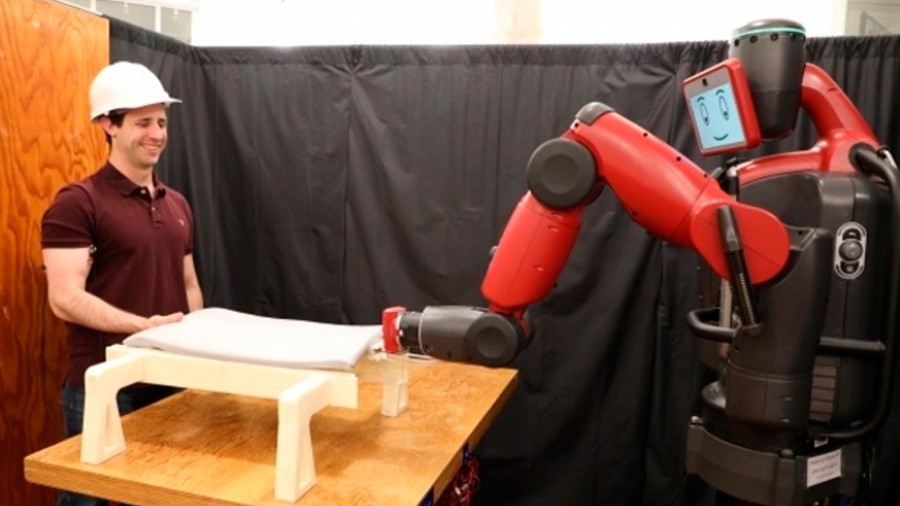
Joseph DelPreto y Daniela Rus de Instituto de Tecnología de Massachusetts (MIT, pos sus siglas en inglés) usaron un enfoque excepcional para lograr esta difícil meta. Hicieron que el robot leyera los movimientos del humano directamente a través de los sensores de actividad muscular. Su prueba fue bastante simple: un robot debía ayudar a levantar un objeto pesado a su compañero, sosteniéndolo desde el otro lado. Además, tenía que colocarlo en un cierto ángulo.
Robots detectando los movimientos de bíceps y tríceps
Para armonizar sus acciones con las del humano, el robot utilizó sensores electromiográficos, es decir, los que registran la actividad eléctrica producida por los músculos esqueléticos. Uno de los sensores está ubicado cerca del bíceps, y el otro cerca del tríceps. El primero se usó para determinar la altura máxima de elevación, mientras que el segundo en el tríceps sirvió para reconocer los gestos del usuario.
Como explican los autores del artículo, el sistema de su robot es capaz de reconocer dos gestos, o sea, levantar o bajar los objetos de mando. Para ello la persona tiene que mover su mano rápidamente en una dirección determinada. Esto es una señal para el robot, gracias a lo cual realiza manipulaciones precisas.
Para evaluar la efectividad de su sistema, los ingenieros pidieron a diez voluntarios que levantaran un objeto junto con un robot en una posición determinada. Cabe mencionar que los ingenieros no midieron su actividad muscular antes del experimento, sino que se realizó directamente. Sin embargo, el robot logró adaptarse a sus movimientos, como podemos ver en el video grabado por el equipo.
Anteriormente, los ingenieros ya experimentaron con sistemas que facilitan la colaboración de humanos y robots. Por ejemplo, un equipo estadounidense creó un algoritmo de realidad aumentada que daba instrucciónes al trabajador y le alertaba cuando tenía que abandonar la zona de trabajo de un robot colaborador.
Fuente: nmas1.org





