Unos ingenieros están probando en una piscina prototipos de robots para futuras misiones espaciales, en las cuales enjambres de robots subacuáticos buscarán señales de vida en mares de otros mundos.
Cuando la sonda espacial Europa Clipper de la NASA llegue a su destino en 2030, la nave preparará sus potentes instrumentos científicos para observar Europa, una luna de Júpiter. Durante 49 sobrevuelos, empleará esos instrumentos para buscar indicios de que el océano de agua líquida situado bajo la corteza helada de la luna pueda albergar vida. Mientras la nave, que despegó el 14 de octubre, transporta un equipamiento científico más avanzado que cualquier otro enviado por la NASA a la región exterior del sistema solar, ya hay científicos desarrollando una nueva generación de robots que en misiones posteriores a la de la Europa Clipper, podrían sumergirse en el mar de Europa y en los mares subterráneos de otras lunas del sistema solar.
El proyecto SWIM (Sensing With Independent Micro-swimmers) se centra en un enjambre de docenas de robots nadadores autopropulsados del tamaño de un teléfono móvil que, una vez introducidos en el medio acuático por un robot que abra un pozo desde la superficie hasta allí, mediante el derretimiento del hielo que se interpone entre ambos puntos, se alejarían en direcciones distintas, buscando señales químicas y térmicas que pudieran indicar la existencia de vida en ese medio acuático.
Puede parecer inusual crear robots submarinos para la exploración espacial, pero cuando el objetivo es buscar vida, hacerlo en mares de otros mundos es un paso lógico teniendo en cuenta que el agua es vital para la vida tal como la conocemos.
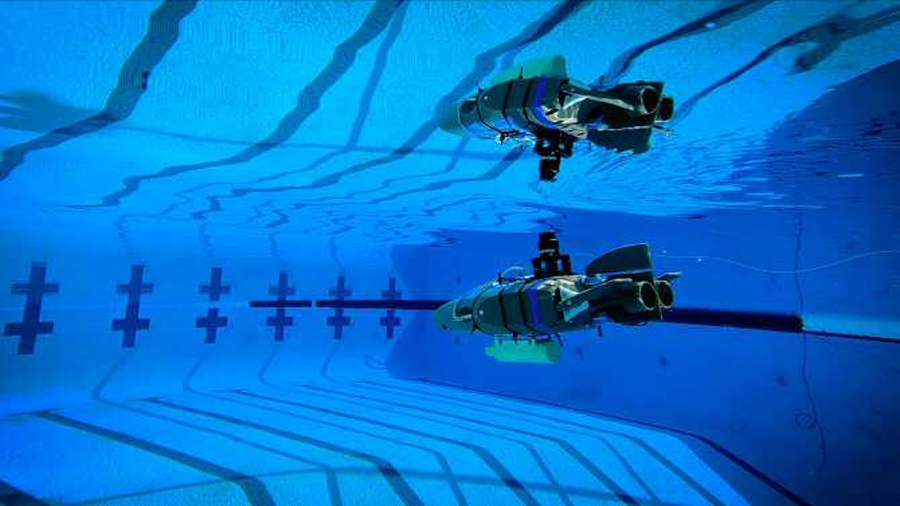
Una serie de prototipos de robots SWIM que se están desarrollando en el Laboratorio de Propulsión a Chorro (JPL) de la NASA se pusieron a prueba recientemente en una gran piscina. Los resultados son alentadores.
El más reciente prototipo de robot SWIM para pruebas está hecho de plástico mediante impresión en 3D y emplea motores y componentes electrónicos de bajo coste y fáciles de encontrar en el mercado. Impulsado por dos hélices y con cuatro aletas de dirección, el prototipo demostró su eficiencia para ejecutar maniobras precisas, una buena capacidad para mantener y corregir su rumbo y una gran habilidad para explorar su entorno acuático. Todo ello de forma autónoma, sin intervención directa del equipo.
El prototipo utilizado en la mayoría de las pruebas en la piscina medía unos 42 centímetros de largo y pesaba 2,3 kilogramos. La versión definitiva de este robot, apta para misiones espaciales, tendría unas dimensiones unas tres veces menores, o sea que cabría en la palma de la mano. Esta reducción de tamaño se lograría por la miniaturización de sus piezas. El robot emplearía un novedoso sistema de comunicación acústica submarina inalámbrica para transmitir datos y para triangular sus posiciones.
Unas versiones digitales de estos pequeños robots tuvieron su propia prueba, no en una piscina, sino en una simulación por ordenador. En un entorno con la misma presión y gravedad que probablemente exista en el mar de Europa, un enjambre virtual de robots de 12 centímetros de longitud buscó repetidamente posibles señales de vida. Las simulaciones por ordenador ayudaron a determinar los límites de la capacidad de los robots para recoger datos científicos en un entorno desconocido y permitieron desarrollar algoritmos que permitirían al enjambre explorar de forma más eficiente.
Las simulaciones también ayudaron al equipo a saber mejor cómo maximizar el rendimiento científico teniendo en cuenta la duración de la batería (hasta dos horas), el volumen de agua que podían explorar los robots (unos 86.000 metros cúbicos) y la cantidad de robots de un enjambre (una docena, enviados en cuatro o cinco oleadas).
Por otra parte, un equipo de colaboradores del Instituto Tecnológico de Georgia (Georgia Tech) en Atlanta (Estados Unidos) ha fabricado y probado un sensor de composición oceánica que permitiría a cada robot medir en el agua simultáneamente la temperatura, la presión, la acidez o alcalinidad, la conductividad y la composición química. Con apenas unos milímetros cuadrados, el chip es el primero de su tipo que combina todos esos sensores en un espacio tan reducido.
Fuente: noticiasdelaciencia.com