

Investigadores de la Universidad de Cambridge han entrenado a su robot chef para evaluar la salinidad de un plato en diferentes etapas del proceso de masticación, imitando un proceso similar en humanos.
Sus resultados podrían ser útiles en el desarrollo de la preparación de alimentos automatizada o semiautomática al ayudar a los robots a aprender qué sabe bien y qué no, haciéndolos mejores cocineros.
Cuando masticamos nuestra comida, notamos un cambio en la textura y el sabor. Por ejemplo, morder un tomate fresco en pleno verano liberará jugos, y mientras masticamos, liberando saliva y enzimas digestivas, nuestra percepción del sabor del tomate cambiará.
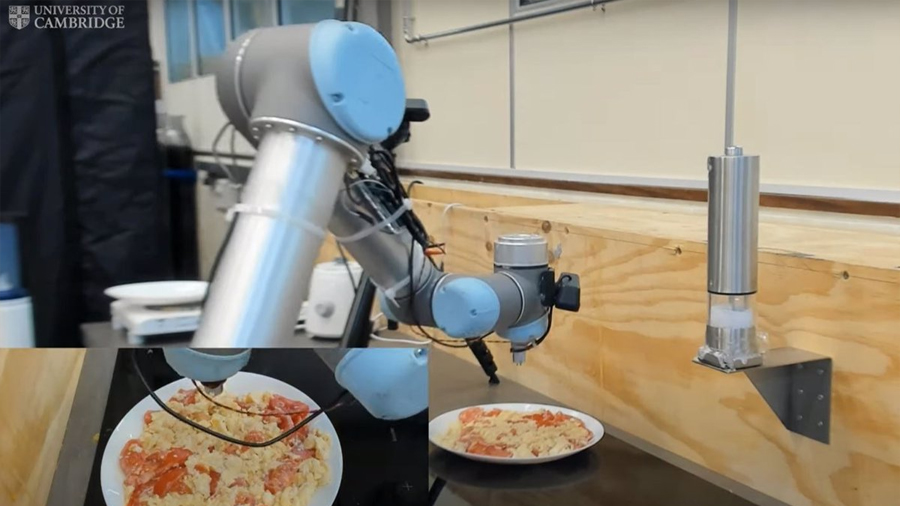
El robot chef, que ya ha sido entrenado en cooperación con el fabricante de electrodomésticos Beko para hacer tortillas según los comentarios de los catadores humanos, probó nueve variaciones diferentes de un plato simple de huevos revueltos y tomates en tres etapas diferentes del proceso de masticación y produjo «mapas de sabor» de los diferentes platos.
Los investigadores descubrieron que este enfoque de «pruebe sobre la marcha» mejoró significativamente la capacidad del robot para evaluar de forma rápida y precisa la salinidad del plato en comparación con otras tecnologías de degustación electrónica, que solo prueban una única muestra homogeneizada. Los resultados se informan en la revista Frontiers in Robotics & AI.
La percepción del gusto es un proceso complejo en los humanos que ha evolucionado durante millones de años: la apariencia, el olor, la textura y la temperatura de los alimentos afectan la forma en que percibimos el gusto; la saliva producida durante la masticación ayuda a transportar los compuestos químicos de los alimentos a los receptores gustativos, principalmente en la lengua; y las señales de los receptores gustativos se transmiten al cerebro. Una vez que nuestros cerebros son conscientes del sabor, decidimos si disfrutamos de la comida o no.
El gusto también es muy individual: a algunas personas les encanta la comida picante, mientras que otras son golosas. Un buen cocinero, ya sea aficionado o profesional, confía en su sentido del gusto y puede equilibrar los diversos sabores dentro de un plato para hacer un producto final completo.
«La mayoría de los cocineros caseros estarán familiarizados con el concepto de degustación sobre la marcha: revisar un plato durante todo el proceso de cocción para verificar si el equilibrio de sabores es el correcto», dijo en un comunicado Grzegorz Sochacki del Departamento de Ingeniería de Cambridge, el primer autor del artículo. «Si se van a usar robots para ciertos aspectos de la preparación de alimentos, es importante que puedan ‘probar’ lo que están cocinando».
«Cuando probamos, el proceso de masticar también proporciona retroalimentación continua a nuestro cerebro», dijo el coautor Dr. Arsen Abdulali, también del Departamento de Ingeniería. «Los métodos actuales de prueba electrónica solo toman una instantánea de una muestra homogeneizada, por lo que queríamos replicar un proceso más realista de masticar y probar en un sistema robótico, lo que debería dar como resultado un producto final más sabroso».
Los investigadores son miembros del Laboratorio de Robótica Bioinspirada de Cambridge dirigido por el profesor Fumiya Iida del Departamento de Ingeniería, que se enfoca en entrenar robots para llevar a cabo los llamados problemas del último metro que los humanos encuentran fáciles, pero los robots encuentran difíciles. Cocinar es una de estas tareas: las pruebas anteriores con su robot ‘chef’ han producido una tortilla aceptable utilizando los comentarios de los catadores humanos.
«Necesitábamos algo barato, pequeño y rápido para agregar a nuestro robot para que pudiera hacer la degustación: tenía que ser lo suficientemente barato para usarlo en una cocina, lo suficientemente pequeño para un robot y lo suficientemente rápido para usarlo mientras se cocina», dijo Sochacki. .
Para imitar el proceso humano de masticar y saborear en su chef robot, los investigadores conectaron una sonda de conductancia, que actúa como un sensor de salinidad, a un brazo robótico. Prepararon huevos revueltos y tomates, variando el número de tomates y la cantidad de sal en cada plato.
Usando la sonda, el robot ‘probó’ los platos en forma de cuadrícula y devolvió una lectura en solo unos segundos.
Para imitar el cambio de textura causado por la masticación, el equipo puso la mezcla de huevo en una licuadora y el robot volvió a probar el plato. Las diferentes lecturas en diferentes puntos de ‘masticación’ produjeron mapas de sabor de cada plato.
Sus resultados mostraron una mejora significativa en la capacidad de los robots para evaluar la salinidad en comparación con otros métodos de degustación electrónicos, que a menudo requieren mucho tiempo y solo brindan una lectura única.
Si bien su técnica es una prueba de concepto, los investigadores dicen que al imitar los procesos humanos de masticar y probar, los robots eventualmente podrán producir alimentos que los humanos disfrutarán y podrían modificarse de acuerdo con los gustos individuales.
«Cuando un robot está aprendiendo a cocinar, como cualquier otro cocinero, necesita indicaciones de qué tan bien lo hizo», dijo Abdulali. «Queremos que los robots entiendan el concepto de sabor, lo que los hará mejores cocineros. En nuestro experimento, el robot puede «ver» la diferencia en la comida a medida que la mastica, lo que mejora su capacidad para saborear».
Fuente: europapress.es