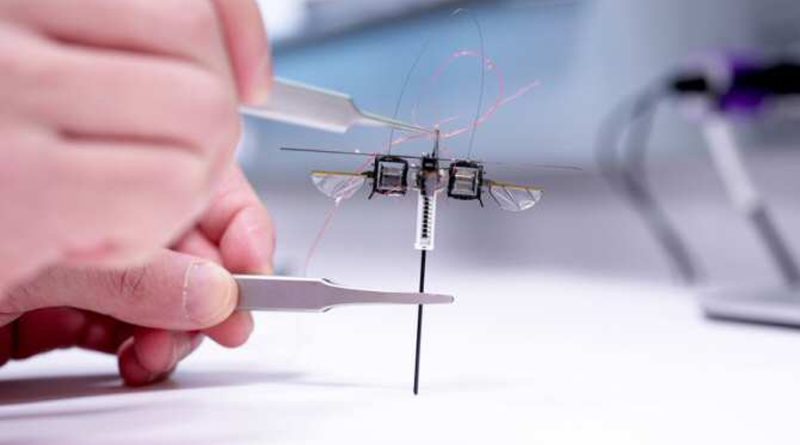
Robot saltarín con alas y una pata
Unos robotistas han creado un robot con el tamaño de un insecto que es capaz de saltar por encima de obstáculos mediante su única pata y ayudándose con el aleteo de sus alas. Aunque es incapaz de mantener un vuelo sostenido, sí puede con su aleteo reforzar y guiar sus saltos, como hacen las gallinas.
El robot es obra de un equipo encabezado por Yi-Hsuan Hsiao, del Instituto Tecnológico de Massachusetts (MIT) en Estados Unidos.
Los robots insectoides pueden introducirse en lugares a los que sus congéneres de mayor tamaño no pueden llegar, como las profundidades de un edificio derrumbado cuando se necesita buscar supervivientes tras un terremoto.
Sin embargo, al desplazarse entre los escombros, los robots insectoides reptantes pueden toparse con obstáculos altos por los que no pueden trepar, o con superficies inclinadas por las que inevitablemente resbalan. Aunque los robots voladores (drones) pueden evitar estos problemas, la cantidad de energía necesaria para volar limita mucho la distancia que el robot puede recorrer entre los escombros antes de tener que regresar a su base para recargarse de energía.
El nuevo robot posee lo mejor de ambos métodos de locomoción. Es capaz de saltar obstáculos altos y de atravesar superficies inclinadas o irregulares, pero además consume mucha menos energía que un robot volador.
El nuevo robot puede saltar unos 20 centímetros en el aire, que es cuatro veces su estatura, a una velocidad lateral de unos 30 centímetros por segundo, y no tiene problemas para saltar sobre hielo, superficies mojadas y suelos irregulares e incluso sobre un dron suspendido en el aire. Además, consume un 60 por ciento menos de energía que los robots voladores de su mismo tamaño.
Gracias a su ligereza y durabilidad, y a la eficiencia energética del proceso de salto, el robot puede transportar unas 10 veces más carga útil que un robot volador de tamaño similar, lo que abre la puerta a muchas aplicaciones nuevas.
Los creadores del robot exponen sus detalles técnicos en la revista académica Science Advances, bajo el título “Hybrid locomotion at the insect scale: Combined flying and jumping for enhanced efficiency and versatility”.
Fuente: noticiasdelaciencia.com