En nuestra vida cotidiana, los humanos no necesitamos mucha información sobre un objeto para saber cómo cogerlo, y ello se debe en buena parte a que ya obtenemos toda la información necesaria tan pronto como nuestra mano comienza a interactuar con el objeto. En esa frontera entre la mano y el objeto, el modo en que se hunde la piel al presionar sobre la superficie del objeto, y muchos otros cambios temporales sutiles que se producen, le brindan a nuestro cerebro toda la información necesaria para manejar el objeto.
Dotar de esta misma capacidad a un robot no es fácil, sobre todo si la superficie de sus manos es rígida.
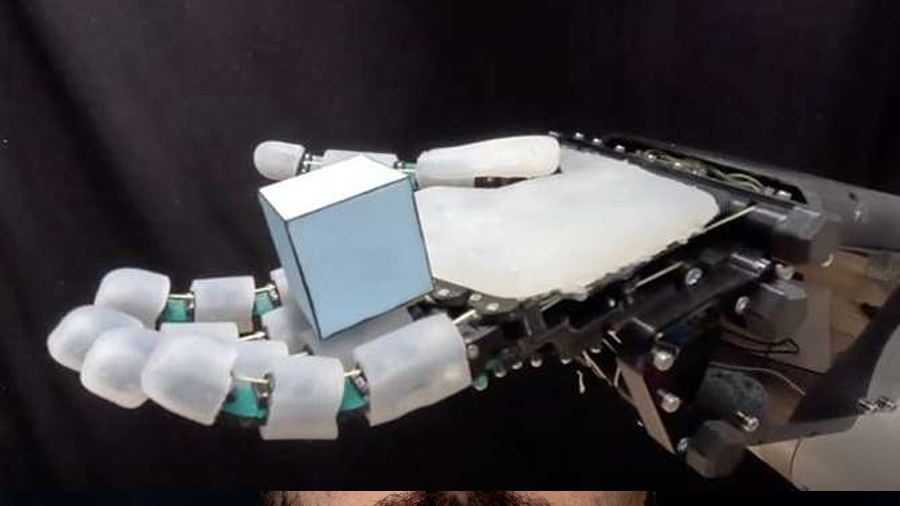
A fin de lograr una mano robótica humanoide que manipule objetos con la misma facilidad con que lo hace la mano humana, Kai Junge y Josie Hughes, ambos de la Escuela Politécnica Federal de Lausana (EPFL) en Suiza, han recurrido a un diseño cuya “piel” incluye áreas que temporalmente se hunden, doblan y/o deforman de otros modos.
La nueva mano robótica puede recoger 24 tipos distintos de objetos, ejecutando para ello movimientos similares a los de la mano humana. Estos movimientos robóticos surgen espontáneamente, gracias a las interacciones mecánicas de la mano con el objeto, en vez de cómo resultado de una programación informática.
La eficiencia de esta mano robótica, llamada ADAPT (Adaptive Dexterous Anthropomorphic Programmable sTiffness), se basa en componentes relativamente simples: tiras de silicona envueltas alrededor de la muñeca y de los dedos, además de articulaciones con muelle, complementado todo ello con un brazo robótico flexible.
En una serie de experimentos, la mano ADAPT, que puede controlarse remotamente, logró coger objetos de los citados 24 tipos distintos con una tasa de éxito del 93%.
Una mano robótica tradicional necesitaría un motor para accionar cada articulación. En cambio, ADAPT cuenta con solo 12 motores, alojados en la muñeca, para sus 20 articulaciones. El resto del control mecánico se realiza mediante resortes, que pueden endurecerse o aflojarse para ajustar la flexibilidad de la mano, y mediante la piel de silicona.
Junge y Hughes exponen los detalles técnicos de su nueva mano robótica en la revista académica Communications Engineering, bajo el título “Spatially distributed biomimetic compliance enables robust anthropomorphic robotic manipulation”.
Fuente: noticiasdelaciencia.com