Unos expertos en robótica han desarrollado una nueva clase de robots blandos que funcionan sin electrónica, sin motores y sin ordenadores, utilizando únicamente la presión del aire y las leyes de la física y de la mecánica. Estos robots neumáticos pueden generar movimientos rítmicos complejos e incluso sincronizar automáticamente sus acciones.
El logro es obra de un equipo integrado, entre otros, por Antonio Forte y Mostafa Mousa, ambos de la Universidad de Oxford en el Reino Unido.
Disponer de maquinaria de locomoción que es automática sin necesidad de informática y que es capaz de generar espontáneamente comportamientos complejos, permite descentralizar funciones y liberar recursos de computación para poder emplearlos en tareas que solo puedan ejecutarse con informática.
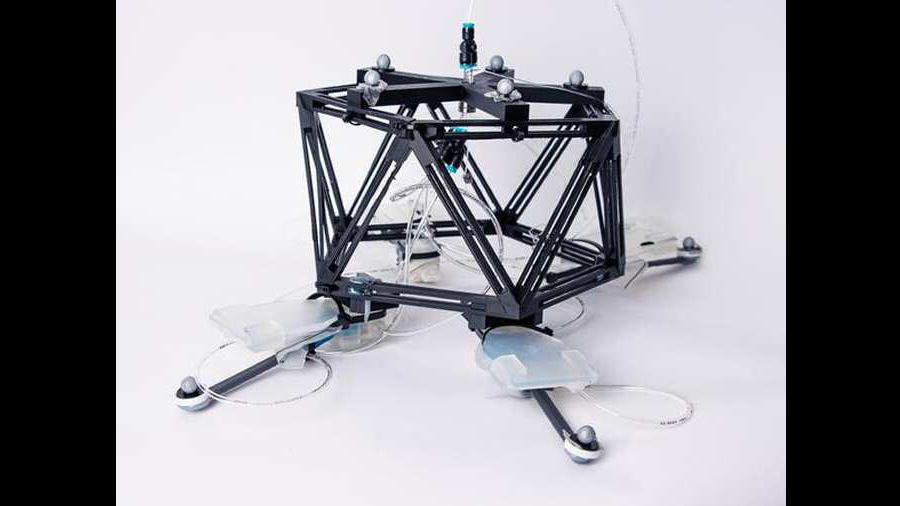
Un robot del nuevo tipo puede ejecutar movimientos complejos y coordinados para desplazarse gracias a su diseño físico y a la propia interacción con la superficie sobre la que camina. El movimiento de cada pata robótica influye sutilmente en el de las demás mediante las fuerzas de reacción del suelo y las del cuerpo compartidas
Esto crea un ciclo de realimentación donde las fuerzas transmitidas por fricción, compresión y rebote conectan los movimientos de las extremidades, dando lugar a una coordinación espontánea.
Si bien los primeros robots blandos de este tipo que el equipo ha creado y probado tienen un tamaño de sobremesa, los principios de diseño son independientes de la escala, según sus creadores,
Por tal razón, estos robotistas creen que en un futuro cercano podrán crear robots de esta clase mucho más grandes y con un grado de autosuficiencia muy superior al de los actuales prototipos de pruebas.
Esta línea de investigación y desarrollo podría conducir al despliegue a gran escala de estos robots en entornos extremos donde los robots alimentados por electricidad estén en desventaja en comparación con los robots neumáticos.
Forte, Mousa y sus colegas exponen los detalles técnicos de su nueva clase de locomoción robótica neumática en la revista académica Advanced Materials, bajo el título “Multifunctional Fluidic Units for Emergent, Responsive Robotic Behaviors”.
Fuente: noticiasdelaciencia.com