La mano es capaz de realizar gestos humanos e, incluso, de jugar a «piedra, papel o tijera». Sin embargo, al igual que las personas, se cansa con el paso del tiempo
Un grupo de investigadores de la Universidad de Tokio ha logrado fabricar una mano robótica articulada empleando músculos humanos cultivados en laboratorio. Esta innovación representa un hito en la robótica biohíbrida al combinar estructuras sintéticas con tejidos biológicos funcionales.
Durante años, uno de los principales desafíos en este campo ha sido evitar la necrosis en tejidos musculares demasiado gruesos. Para solucionarlo, el equipo dirigido por el profesor Shoji Takeuchi desarrolló una técnica que consiste en formar cilindros a partir de láminas musculares delgadas, enrolladas sobre sí mismas, como si se tratara de un makisushi.
Una técnica revolucionaria para conservar los tejidos vivos
Estos cilindros, conocidos como MuMuTAs (siglas en inglés de actuadores de tejido muscular múltiple), permiten mantener la oxigenación y nutrición celular, al tiempo que conservan una fuerza contráctil suficiente para mover mecanismos. Al aplicar impulsos eléctricos, los músculos se contraen y generan movimiento en componentes robóticos previamente conectados.
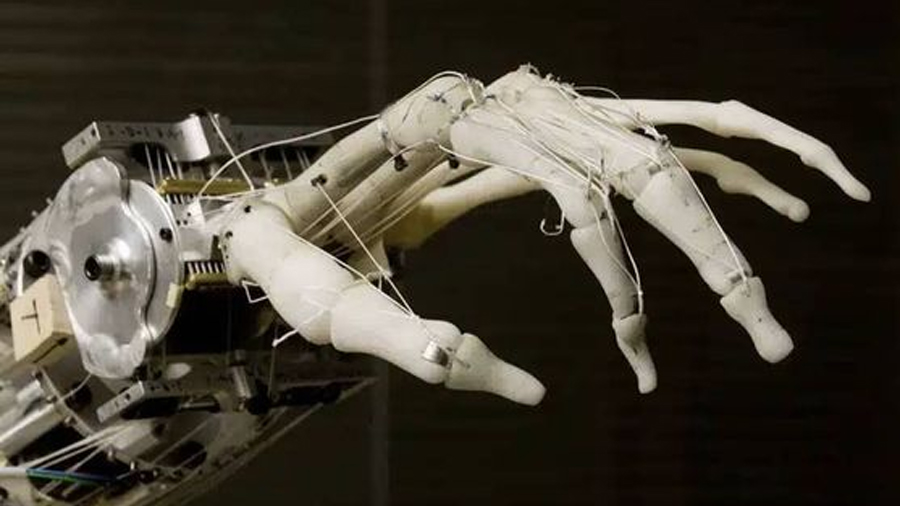
Como muestran en un artículo publicado en Science, la estructura robótica desarrollada mide 18 centímetros de largo y se encuentra suspendida en un medio líquido. Está compuesta por una mano impresa en 3D con cinco dedos, cada uno con tres articulaciones. Cada dedo se acciona mediante cables unidos a un MuMuTA, que se aloja en un compartimento de vidrio independiente para aislar los impulsos eléctricos.
Es capaz de manipular objetos y realizar gestos humanos
El sistema demostró ser capaz de ejecutar gestos como los del juego “piedra, papel o tijera” y de sujetar herramientas ligeras, como una pipeta de laboratorio. Cada actuador genera aproximadamente 8 milinewtons de fuerza, cantidad suficiente para levantar un clip.
El músculo artificial utilizado presenta una densidad de fuerza de 0,7 milinewtons por milímetro cuadrado, una cifra inferior a la del tejido muscular humano, que ronda los 6 milinewtons. Sin embargo, esta cifra mejora notablemente lo conseguido hasta ahora en tejidos cultivados.
Eso sí, los investigadores detectaron que la mano robótica comenzaba a mostrar signos de fatiga tras unos diez minutos de uso. Después de una hora de reposo en el medio líquido, los músculos recuperaban su funcionalidad. “Al igual que los músculos naturales, los músculos diseñados podrían beneficiarse del ejercicio para mejorar su resistencia y fuerza contráctil”, señaló Takeuchi al respecto.
Fuente: elconfidencial.com