Robots que transmiten a otros las habilidades que han aprendido de humanos
La mayoría de robots son programados usando uno de dos métodos: aprendizaje a partir de la demostración, en la que observan una tarea mientras se está realizando y después la reproducen, o a través de técnicas de planificación de movimientos, tales como optimización o muestreo, que requieren que un programador especifique explícitamente los objetivos y límites de una tarea.
Ambos métodos tienen inconvenientes. Los robots que aprenden a partir de la demostración no pueden transferir fácilmente una habilidad que hayan aprendido a otra situación y seguir siendo precisos. Por otro lado, los sistemas de planificación de movimientos que utilizan el muestreo o la optimización pueden adaptarse a estos cambios, pero ello lleva tiempo, dado que normalmente tienen que ser recodificados a mano por programadores humanos expertos.
Unos investigadores del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL), adscrito al Instituto Tecnológico de Massachusetts (MIT), en Cambridge, Estados Unidos, han desarrollado un sistema cuyo objetivo es tender puentes entre las dos técnicas: el C-LEARN, que permite a los no programadores enseñar a los robots una serie de tareas simplemente proporcionándoles alguna información sobre cómo se manipulan normalmente los objetos, y mostrando después al robot una única demostración de la tarea.
De forma importante, esto permite a los usuarios enseñar a los robots habilidades que puedan ser transferidas automáticamente a otros que tengan formas diferentes de moverse, una capacidad de propagar conocimientos entre los robots que resulta esencial para ahorrar tiempo y dinero cuando el objetivo es adiestrar a muchos robots, con la máxima rapidez y sin preparación previa por diseño de software, para que sean capaces de realizar una serie de acciones.
Combinando el carácter intuitivo del aprendizaje mediante la demostración, con la precisión de los algoritmos de planificación de movimientos, este enfoque puede ayudar a los robots a realizar nuevos tipos de tareas que no han podido aprender a hacer antes, como por ejemplo ensamblar objetos, usando ambos brazos, a través de varios pasos.
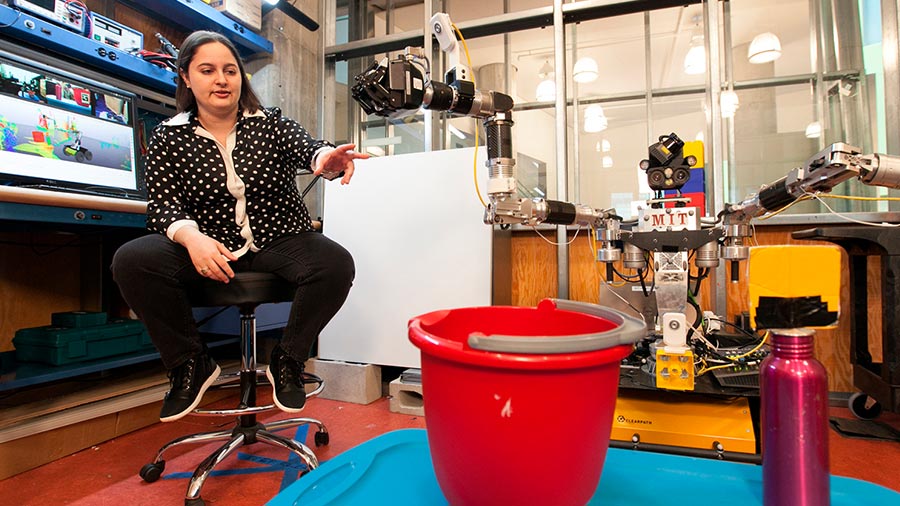
El equipo de las robotistas Claudia Pérez-D’Arpino y Julie Shah ensayó el sistema sobre el Optimus, un nuevo robot de dos brazos diseñado para neutralizar bombas, al que programaron para realizar tareas como abrir puertas, transportar objetos y extraerlos de contenedores. En simulaciones, mostraron que las habilidades aprendidas por el Optimus podían ser transferidas sin problemas a otro robot, bastante distinto, llamado Atlas, de aspecto humanoide, con casi 200 kilogramos de peso y propiedad del CSAIL. Al Atlas, diseñado con financiación militar, se le ha descrito coloquialmente como “el primer Terminator” por su aspecto amenazante, así como por su notable grado de sofisticación que, aunque muy por debajo del de los Terminators de la saga de ciencia-ficción con ese nombre, alcanza un nivel lo bastante alto como para justificar esa comparación con el hipotético modelo más primitivo y antiguo de un Terminator.
Fuente: noticiasdelaciencia.com