

Con una cantidad cada vez mayor de accidentes graves, en la industria mundial del petróleo y la del gas, causados por oleoductos dañados, unos robotistas decidieron diseñar un robot autónomo capaz de identificar daños estructurales en oleoductos y posibles fugas de ellos, durante las inspecciones submarinas.
La iniciativa es obra de Zheng Chen y Gangbing Song, investigadores de la Universidad de Houston en Estados Unidos.
La inspección oportuna de las infraestructuras submarinas, especialmente de los oleoductos y los pozos de extracción, es vital para prevenir esos desastres. Sin embargo, las técnicas de inspección actuales a menudo requieren un buzo humano bien capacitado y mucho tiempo y dinero. El desafío es aún mayor si el objetivo de la inspección se encuentra a gran profundidad bajo el agua.
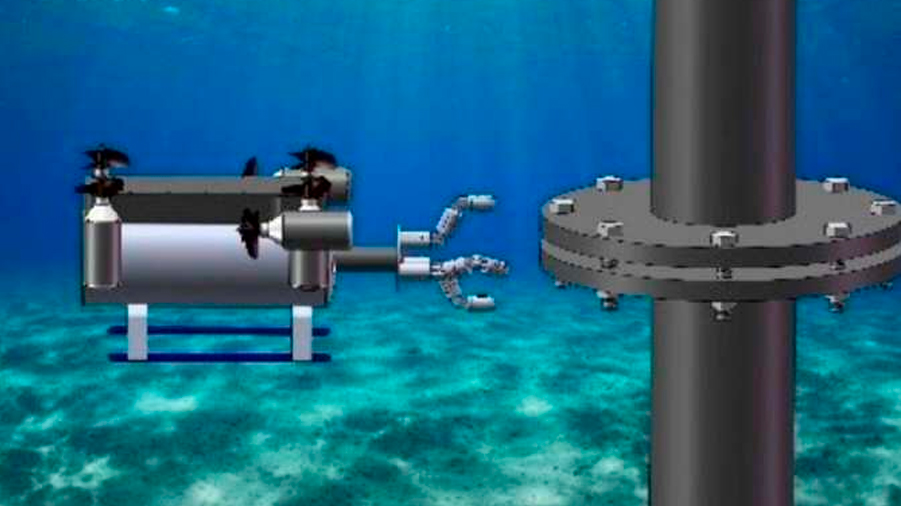
La tecnología SmartTouch, ahora en desarrollo en la Universidad de Houston, consta de vehículos dirigidos remotamente (ROVs, por sus siglas en inglés) equipados con múltiples sensores táctiles inteligentes, cámaras de video y sonares. Estos vehículos robotizados pueden nadar a lo largo de una tubería submarina para inspeccionar puntos débiles. Las conexiones atornilladas son los puntos débiles más plausibles, y de hecho han acelerado la tasa de accidentes en tuberías.
Un prototipo del ROV ya ha sido puesto a prueba, en la bahía de Galveston. Los resultados de los experimentos han demostrado la viabilidad del nuevo sistema.
Fuente: noticiasdelaciencia.com