

Unos robotistas han creado una nueva y prometedora clase de músculos artificiales, inspirados en los del cuerpo humano y destinados a robots humanoides.
El logro es obra de un equipo integrado, entre otros, por Taekyoung Kim y Ryan Truby, de la Universidad del Noroeste en Evanston, Illinois, Estados Unidos.
Los nuevos músculos proporcionan el rendimiento y las propiedades mecánicas necesarias para construir con ellos cuerpos robóticos que además podrán estar dotados de un esqueleto artificial.
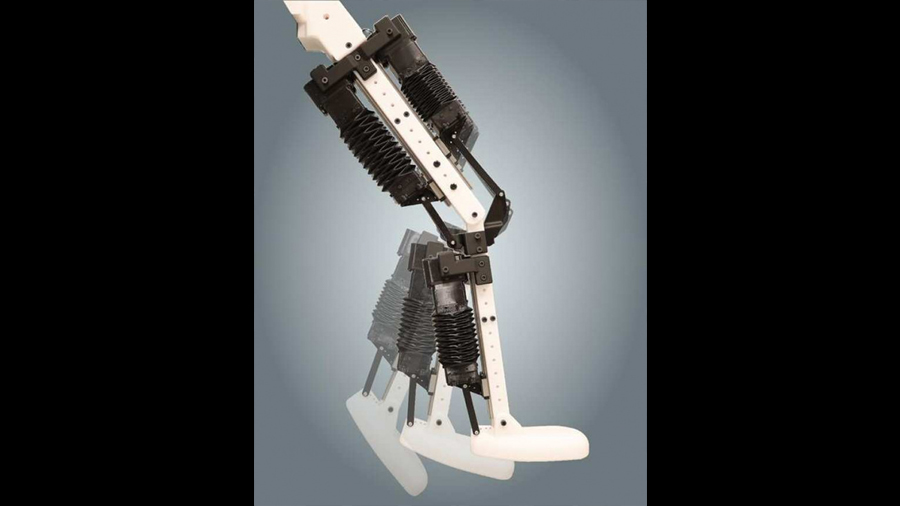
Para demostrar las capacidades de los músculos artificiales, los robotistas los instalaron en una pierna robótica humanoide de tamaño natural, con «huesos» de plástico rígido, «tendones» elásticos también artificiales e incluso un sensor que permite al robot «sentir» sus movimientos. La pierna utiliza tres músculos artificiales, equivalentes a otros tantos de la pierna humana, para flexionar las articulaciones de la rodilla y el tobillo. Los músculos son lo suficientemente flexibles como para absorber impactos y pueden aplicar la fuerza y el movimiento necesarios para que la pierna pueda chutar eficazmente una pelota.
Las innovaciones como esta en materiales bioinspirados podrían cambiar la forma en que los robots humanoides o cuadrúpedos caminan, corren, interactúan con los humanos y se desenvuelven en su entorno.
Los robots suelen construirse con materiales rígidos y mecanismos que permiten un movimiento preciso para tareas específicas. Pero para robots que deban estar preparados para realizar cualquier tarea y para actuar en cualquier entorno, ese tipo de diseño no basta.
Los nuevos músculos artificiales desarrollados por Kim, Truby y sus colegas permitirán cuerpos robóticos con la suficiente flexibilidad física y capacidad de adaptación a múltiples situaciones como para afrontar la incertidumbre inherente al mundo real, fuera del entorno predecible de un laboratorio o de una fábrica. Tras este primer paso, vendrán los huesos robóticos y los tendones robóticos.
El equipo de Kim y Truby expone los detalles técnicos de su nuevo enfoque de diseño en la revista académica Advanced Materials, bajo el título “Architected Soft Actuators for Artificial Musculoskeletal Systems”.
Fuente: noticiasdelaciencia.com