

Ingenieros estadounidenses han desarrollado un ornitóptero que usa alas similares a las que usan los colibríes. Una de las características del robot es que puede detectar colisiones con obstáculos o acercarse al piso debido al cambio en la corriente de los motores eléctricos que impulsan las alas. Los ingenieros describieron el desarrollo en tres artículos (1, 2, 3), los cuales se presentarán en la conferencia ICRA 2019.
Los colibríes son conocidos por su técnica de vuelo, que les permite realizar maniobras inaccesibles para muchas otras aves. Por ejemplo, pueden volar en un punto fijo, así como moverse hacia arriba, hacia abajo o incluso hacia atrás. Durante el vuelo, el ala del colibrí está constantemente en posición recta y describe la figura ocho en el aire durante cada ciclo. Debido a la rotación del plano del ala, produce una fuerza de elevación cuando se mueve hacia adelante y hacia atrás.

Robotbrí
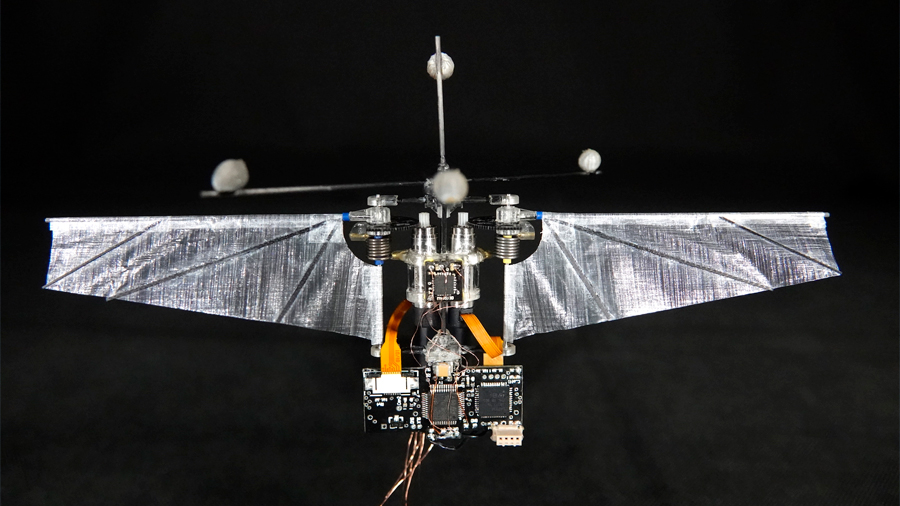
Ahora. Xinyan Deng y sus colegas de la Universidad de Purdue crearon un robot que utiliza un mecanismo similar durante el vuelo, además de poder rastrear el entorno utilizando motores sin sensores adicionales. El robot tiene un cuerpo simétrico con dos motores de corriente continua. Cada motor está conectado a un eje superior, sobre la cual se fija un ala de polímero blando.
Durante el vuelo, las alas del robot oscilan a una frecuencia de 34 hercios, una frecuencia comparable al de las alas de los colibríes reales. De manera impresionante, los robots han logrado que, como el ave de verdad, el pequeño robot se mantenga volando en un lugar fijo y se mueva a un punto deseado.
Además, los ingenieros mostraron cómo el diseño y los algoritmos del robot le permiten enfrentar situaciones anormales. Por ejemplo, en el video de demostración se puede ver cómo el robot hace un vuelo estable con diferentes longitudes de alas e incluso cuando el extremo del ala se destruye durante el vuelo.
La característica principal del robot es el mecanismo para rastrear el entorno utilizando motores eléctricos. Para hacer esto, los desarrolladores han creado un algoritmo que rastrea la corriente consumida por los motores. En base a esto, el ornitóptero puede determinar la proximidad al piso debido al levantamiento adicional debido al efecto de pantalla. Usando este algoritmo, el robot vuela a la misma altura independientemente del terreno. Además, puede detectar la posible colisión con un obstáculo y su ubicación aproximada en relación con el cuerpo.
En la implementación actual, el robot recibe energía y comandos a través del cable, y su posición se monitorea utilizando cámaras externas y marcadores infrarrojos. Al mismo tiempo, los ingenieros señalan que, durante las pruebas, el robot levantó en el aire una carga con una masa superior a la suya, por lo que puede equiparse en el futuro para un vuelo autónomo al agregar el equipo apropiado.
El año pasado, los ingenieros holandeses crearon un robot similar capaz de volar de forma autónoma, pero con un diseño de ala diferente. En cada lado del robot se encuentran dos pares de alas, impulsadas por un motor, así como rotores adicionales para la corrección de movimiento. Usando estos mecanismos, el ornitóptero puede controlar su movimiento alrededor de tres ejes y realizar maniobras bastante complejas, como una inversión de vuelo.
Fuente: nmas1.org