

Nuestra misión es demostrar que una red de robots móviles puede cooperar para realizar una tarea sin intervención humana, de forma autónoma, dijo Subha Comandur
La NASA prepara, para 2024, el envío de un trío de rovers miniatura a la Luna para ver cómo pueden cooperar entre sí, sin la intervención directa de los controladores de la misión en la Tierra.
Un experimento con una visión de trabajo en equipo para demostrar nueva tecnología, el proyecto CADRE (Exploración Robótica Distribuida Autónoma Cooperativa) marca otro paso que la agencia está dando hacia el desarrollo de robots que, al operar de forma autónoma, pueden aumentar la eficiencia de futuras misiones. Y, al tomar medidas simultáneas desde múltiples ubicaciones, los rovers están destinados a mostrar cómo las misiones multirobot podrían potencialmente permitir nueva ciencia o apoyar a los astronautas.
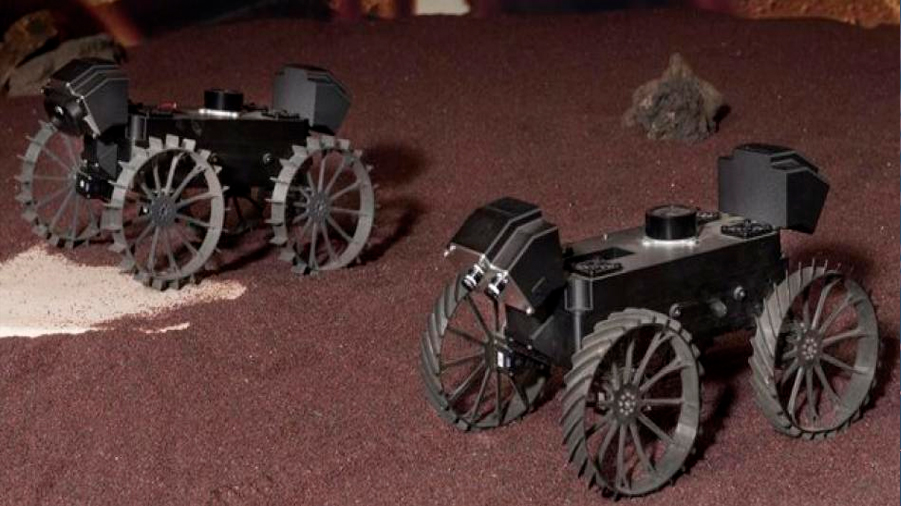
Actualmente, el proyecto está programado para llegar a bordo de un módulo de aterrizaje en 2024, como parte de la iniciativa CLPS (Commercial Lunar Payload Services) de la NASA, los tres pequeños rovers de CADRE se bajarán a la región Reiner Gamma de la Luna a través de ataduras. Cada uno del tamaño de una maleta de mano, los rovers de cuatro ruedas conducirán para encontrar un lugar para tomar el sol, donde abrirán sus paneles solares y se cargarán. Luego, pasarán un día lunar completo, unos 14 días terrestres, realizando experimentos diseñados para probar sus capacidades.
«Nuestra misión es demostrar que una red de robots móviles puede cooperar para realizar una tarea sin intervención humana, de forma autónoma», dijo en un comunicado Subha Comandur, gerente de proyecto CADRE en el Laboratorio de Propulsión a Chorro de la NASA en el sur de California. «Podría cambiar la forma en que hacemos la exploración en el futuro. La pregunta para futuras misiones será: ¿Cuántos rovers enviamos y qué harán juntos?»
Los controladores de la misión en la Tierra enviarán una directiva amplia a la estación base de los rovers a bordo del módulo de aterrizaje de 4 metros de altura. Luego, el equipo de pequeños robots elegirá un «líder», que a su vez distribuirá las asignaciones de trabajo para lograr el objetivo colectivo. Cada rover descubrirá la mejor manera de completar de manera segura su tarea asignada.
«La única instrucción es, por ejemplo, ‘Ve a explorar esta región’, y los rovers resuelven todo lo demás: cuándo conducirán, qué camino tomarán, cómo maniobrarán alrededor de los peligros locales», dijo. Jean-Pierre de la Croix del JPL, investigador principal de CADRE. «Sólo les dices el objetivo de alto nivel y ellos tienen que determinar cómo lograrlo».
Los rovers se enfrentarán a varias pruebas, todas a la vista de una cámara de monitoreo en la estación base sobre el módulo de aterrizaje. El primero es conducir en formación y mantener el rumbo utilizando radios de banda ultraancha para mantener sus posiciones relativas mientras se confía en los sensores para evitar obstáculos.
En un segundo experimento, cada uno de los rovers tomará un camino de su propia elección para explorar un área designada de aproximadamente 400 metros cuadrados, creando un mapa topográfico en 3D con cámaras estéreo. El proyecto también evaluará qué tan bien se adaptaría el equipo si un rover dejara de funcionar por algún motivo. El éxito indicará que las misiones multirobot son una buena opción para explorar terrenos peligrosos pero científicamente gratificantes.
Y aunque CADRE no se enfoca en realizar ciencia, los rovers estarán equipados con radares de penetración terrestre multiestáticos. Conduciendo en formación, cada rover recibirá el reflejo de las señales de radio enviadas por los demás, creando una imagen 3D de la estructura del subsuelo hasta 10 metros por debajo. Juntos, pueden recopilar datos más completos que los radares de penetración terrestre de última generación como el del rover Perseverance Mars de la NASA, RIMFAX (Radar Imager for Mars’ Subsurface Experiment).
«Veremos cómo varios robots trabajando juntos, haciendo múltiples mediciones en diferentes lugares al mismo tiempo, pueden registrar datos que serían imposibles de lograr para un solo robot», dijo Comandur. «Podría ser una forma innovadora de hacer ciencia».
Pero CADRE es más que probar la autonomía y las capacidades de trabajo en equipo: los rovers también deben sobrevivir al duro entorno térmico cerca del ecuador de la Luna, lo que representa un desafío para robots tan pequeños. Bajo la luz del sol abrasador, los rovers podrían enfrentar temperaturas del mediodía de hasta 114 grados Celsius. Fabricados con una combinación de piezas comerciales listas para usar y componentes hechos a la medida, los rovers deben ser lo suficientemente robustos para resistir el calor del día y, al mismo tiempo, ser compactos y livianos.
Al mismo tiempo, deben tener la potencia informática para ejecutar el software de autonomía cooperativa desarrollado por JPL. Es un equilibrio difícil: los rovers y la estación base del proyecto obtienen su poder mental de un pequeño chip de procesamiento (la próxima generación del procesador de clase de teléfono celular dentro del helicóptero Ingenuity de la NASA), pero usar el procesador contribuye al calor.
Para evitar que los rovers sucumban a la temperatura, el equipo de CADRE ideó una solución creativa: ciclos de vigilia y sueño de 30 minutos. Cada media hora, los rovers se apagarán, se enfriarán a través de radiadores y recargarán sus baterías.
Cuando se despierten simultáneamente, compartirán su estado de salud entre ellos a través de una red de radio en malla (muy parecida a una red Wi-Fi doméstica) y una vez más, elijirán un líder en función de cuál sea el más apto para la tarea en cuestión. Luego, emprenderán otra ronda de exploración lunar.
Fuente: EP