

En Georgia Tech han creado un nuevo tipo de diminuto robot impreso en 3D que se mueve aprovechando la vibración de actuadores piezoeléctricos, fuentes de ultrasonido o incluso pequeños altavoces.
Los enjambres de estos dispositivos pueden trabajar juntos para detectar cambios ambientales, mover materiales, o quizás algún día reparar lesiones dentro del cuerpo humano.
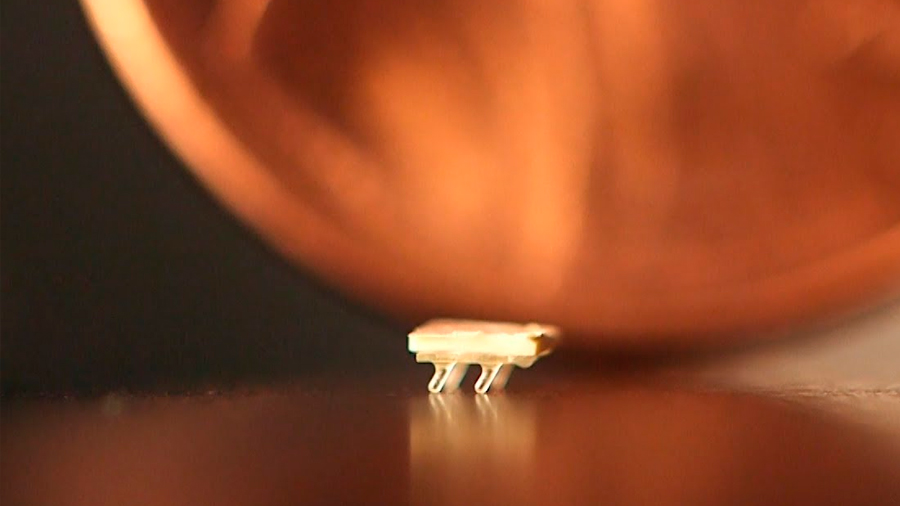
Los robots prototipo responden a diferentes frecuencias de vibración en función de sus configuraciones, lo que permite a los investigadores controlar los robots individuales ajustando la vibración. Con aproximadamente dos milímetros de largo, aproximadamente del tamaño de la hormiga más pequeña del mundo, los bots pueden cubrir cuatro veces su propia longitud en un segundo a pesar de las limitaciones físicas de su pequeño tamaño.
«Estamos trabajando para hacer que la tecnología sea robusta, y tenemos muchas aplicaciones potenciales en mente», dijo Azadeh Ansari, profesor asistente en la Escuela de Ingeniería Eléctrica e Informática del Instituto de Tecnología de Georgia. «Estamos trabajando en la intersección de mecánica, electrónica, biología y física. Es un área muy rica y hay mucho espacio para conceptos multidisciplinarios», añadió en un comunicado.

Un artículo que describe estos bots ha sido aceptado para su publicación Journal of Micromechanics and Microengineering.
Los micro-bristle-bots consisten en un actuador piezoeléctrico pegado a un cuerpo de polímero que se imprime en 3D utilizando litografía de polimerización de dos fotones (TPP). El actuador genera vibración y se alimenta externamente porque ninguna batería es lo suficientemente pequeña como para caber en el robot. Las vibraciones también pueden provenir de un agitador piezoeléctrico debajo de la superficie sobre la cual se mueven los robots, de una fuente de ultrasonido / sonar, o incluso de un pequeño altavoz acústico.
Las vibraciones mueven las patas elásticas hacia arriba y hacia abajo, impulsando el micro-bot hacia adelante. Cada robot puede diseñarse para responder a diferentes frecuencias de vibración según el tamaño de la pata, el diámetro, el diseño y la geometría general. La amplitud de las vibraciones controla la velocidad a la que se mueven los micro-bots.
«A medida que se mueven hacia arriba y hacia abajo, el movimiento vertical se traduce en un movimiento direccional al optimizar el diseño de las patas, que parecen cerdas», explicó Ansari. «Las patas del micro-robot están diseñadas con ángulos específicos que les permiten doblarse y moverse en una dirección en respuesta resonante a la vibración».
Los actuadores piezoeléctricos, que usan el material plomo titanato de circonato (PZT), vibran cuando se les aplica voltaje eléctrico. A la inversa, también pueden usarse para generar un voltaje, cuando se vibran, una capacidad que los robots podrían usar para encender los sensores a bordo cuando son accionados por vibraciones externas.
Fuente: EP