

Científicos de la Universidad de Tokio han logrado integrar tejido muscular vivo en robots, que presentaron un movimiento notable y función muscular continua durante más de una semana.
Su nuevo método para crear robots biohíbridos, presentado en Science Robotics, progresa desde células precursoras musculares individuales hasta láminas llenas de células musculares, y luego a tejidos del esqueleto muscular completamente funcionales. Los investigadores incorporaron estos músculos en un robot biohíbrido como pares antagónicos que imitan a aquellos en el cuerpo.
El equipo primero construyó un esqueleto de robot en el que instalar el par de músculos en funcionamiento. Esto incluyó una articulación giratoria, anclajes donde los músculos podrían unirse, y electrodos para proporcionar el estímulo para inducir la contracción muscular. Para la parte del músculo vivo del robot, en lugar de extraer y usar un músculo que se había formado completamente en el cuerpo, el equipo construyó uno desde cero.
Para esto, utilizaron láminas de hidrogel que contenían células precursoras musculares llamadas mioblastos, agujeros para unir estas láminas a los anclajes del esqueleto del robot y bandas para alentar a las fibras musculares a formarse de forma alineada.
«Una vez que habíamos construido los músculos, los utilizamos con éxito como pares antagónicos en el robot, con uno contrayendo y el otro expandiéndose, al igual que en el cuerpo», dice en un comunicado el autor correspondiente del estudio, Shoji Takeuchi. «El hecho de que estuvieran ejerciendo fuerzas opuestas entre sí los detuvo encogiéndose y deteriorándose, como en estudios previos», añade.
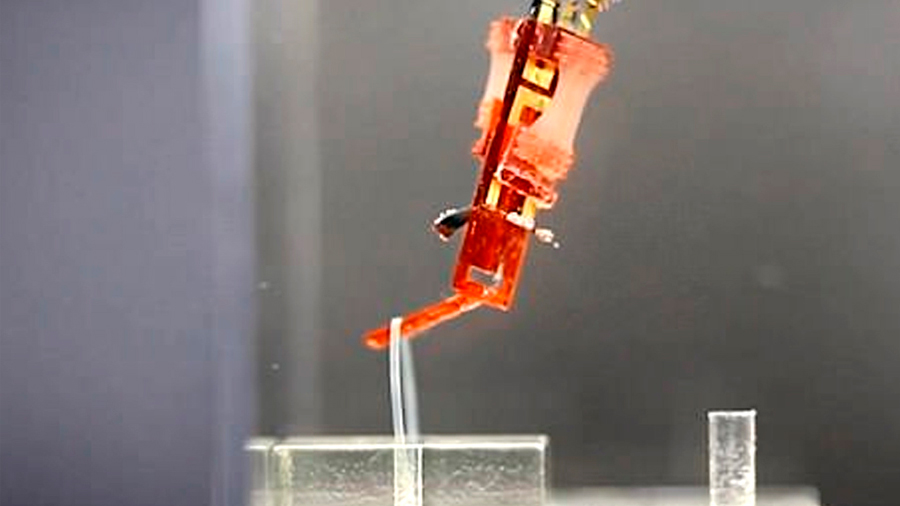
El equipo también probó los robots en diferentes aplicaciones, incluyendo un robot que pueda coger y colocar un anillo, y dos robots trabajando al unísono para recoger un marco cuadrado. Los resultados mostraron que los robots podían realizar bien estas tareas, con la activación de los músculos que conducen a la flexión de una protuberancia similar a un dedo en el extremo del robot en alrededor de 90°.
«Nuestros hallazgos muestran que, usando esta disposición antagónica de los músculos, estos robots pueden imitar las acciones de un dedo humano», dice el autor principal, Yuya Morimoto. «Si podemos combinar más de estos músculos en un solo dispositivo, deberíamos poder reproducir la compleja interacción muscular que permite que las manos, los brazos y otras partes del cuerpo funcionen», concluye.
Fuente: europapress.es