

Una nueva serie de imágenes muestra el campo de visión de la cámara de navegación de la nave espacial ORISIS-REx de la NASA en su ensayo de la próxima recolección de muestras del asteroide Bennu.
Este segundo ensayo, realizado el 11 de agosto, llevó a la nave espacial a través de las primeras tres maniobras de la secuencia de muestreo a un punto aproximadamente a 40 metros sobre la superficie, después de lo cual la nave espacial realizó una combustión en retroceso.
Estas imágenes ( https://www.asteroidmission.org/wp-content/uploads/2020/08/NavCam2-Mathcpoint-Rehearsal-Gif.gif ) se capturaron durante un período de tres horas: la secuencia de imágenes comienza aproximadamente una hora después de la maniobra de salida de la órbita y termina aproximadamente dos minutos después de la quema de retroceso.
Another incredible view from last week’s Matchpoint rehearsal!
— NASA's OSIRIS-REx (@OSIRISREx) August 18, 2020
This image series shows the navigation camera’s perspective during the event, as well as my closest approach of ~131 feet (~40 meters). Near the end, site Nightingale comes into view at the top of the frame. pic.twitter.com/34SRzrP11m
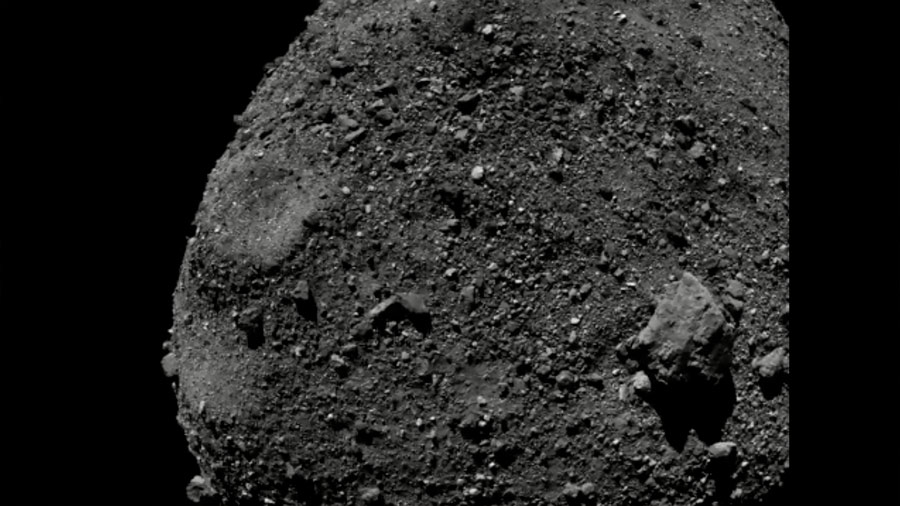
En el medio de la secuencia, la nave espacial gira o gira, de modo que la cámara, denonminada NavCam 2, mira lejos de Bennu, hacia el espacio. Poco después, realiza un giro final para apuntar la cámara (y el brazo de muestreo) hacia la superficie nuevamente, informa la web de la misión en un comunicado. Cerca del final de la secuencia, el sitio Nightingale aparece a la vista en la parte superior del cuadro. La gran roca alta situada en el borde del cráter (arriba a la izquierda) mide 13 metros en su eje más largo. La secuencia se creó utilizando casi 300 imágenes tomadas por la cámara NavCam 2 de la nave espacial.
NavCam 2 captura imágenes para el sistema de navegación Natural Feature Tracking (NFT) de la nave espacial. El sistema NFT permite que la nave espacial se guíe de forma autónoma a la superficie de Bennu comparando imágenes en tiempo real con un catálogo de imágenes a bordo. A medida que la nave espacial desciende a la superficie, el sistema NFT actualiza el punto de contacto previsto de la nave espacial según la posición de OSIRIS-REx en relación con los puntos de referencia de Bennu.
Durante el evento de recolección de muestras, programado para octubre, la cámara NavCam 2 tomará imágenes continuamente de la superficie de Bennu para que el sistema NFT pueda actualizar la posición y velocidad de la nave espacial en relación con Bennu a medida que desciende hacia el punto de aterrizaje objetivo.
NavCam 2, un generador de imágenes pancromático (blanco y negro), es una de las tres cámaras que comprenden TAGCAMS (el sistema de cámara Touch-and-Go), que forma parte del sistema de guía, navegación y control de OSIRIS-REx. TAGCAMS fue diseñado, construido y probado por Malin Space Science Systems; Lockheed Martin Space integró TAGCAMS a la nave espacial OSIRIS-REx y opera TAGCAMS.
Fuente: europapress.es