Crean instrumental quirúrgico inteligente que llega a donde no accede el cirujano
Se trabaja en el desarrollo de un sistema robótico “ponible” para cirugía mínimamente invasiva, que ofrecerá a los cirujanos la capacidad de operar a través de espacios que serían demasiado pequeños para sus manos. La novedad es que podrán hacerlo con movimientos manuales naturales, sin pérdida alguna de destreza, y conservando la capacidad de “palpar” y “sentir” los tejidos internos.
En este proyecto de investigación, financiado por la Comisión Europea, intervienen diversas entidades, entre ellas la Universidad del Oeste de Inglaterra y la Universidad de Bristol, ambas en el Reino Unido.
La cirugía mínimamente invasiva está reemplazando, para algunas especialidades quirúrgicas, al método tradicional en el que se accede al interior a través de un corte amplio, y ha estado asociada con beneficios para los pacientes, como una menor pérdida de sangre, menos infecciones y una recuperación más rápida. Los sistemas robóticos más avanzados tienen el potencial de reemplazar a las herramientas laparoscópicas para este tipo de cirugía en varias modalidades clínicas, en caso de que se introduzcan las mejoras necesarias en sus cualidades ergonómicas, en su nivel de precisión y en su capacidad de visión.
El equipo integrado, entre otros, por Sanja Dogramadzi, Raimondo Ascione y Chris Melhuish, desarrollará y perfeccionará herramientas biomédicas modernas basándose en criterios prácticos surgidos de evaluaciones realizadas por una gran cantidad de cirujanos.
Las nuevas herramientas biomédicas pueden ser usadas por el cirujano y transmitir sin restricciones los propios movimientos de este hasta la interfaz quirúrgica. Esto reducirá las exigencias cognitivas, de manipulación y adiestramiento en el uso de las nuevas herramientas.
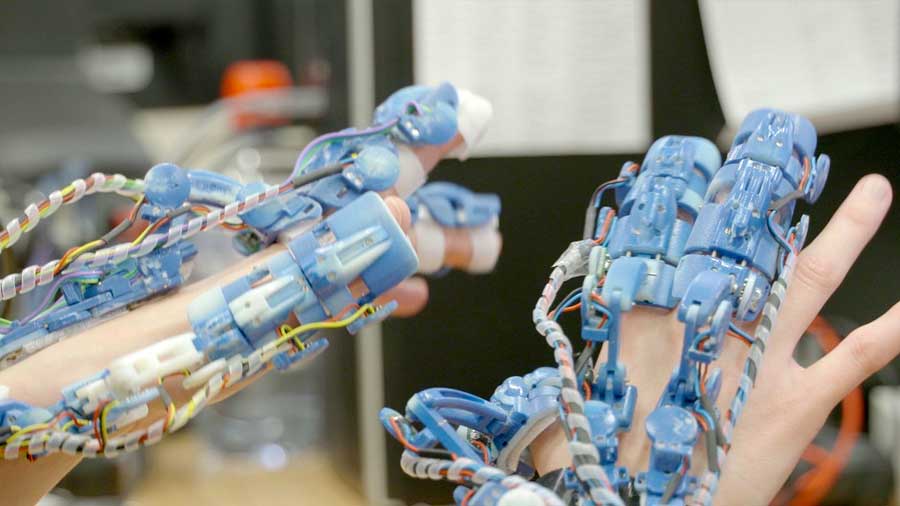
Un componente fundamental del nuevo instrumental es el exoesqueleto para mano. Estos exoesqueletos encajarán en las manos de los cirujanos como si fuesen guantes. Gracias a ellos, el cirujano controlará, con sus movimientos manuales naturales, las acciones dentro del cuerpo del paciente.
Estas acciones las ejecutará en muchos casos una “pinza” quirúrgica recién desarrollada que simula el pulgar y dos dedos de la mano. El instrumento, que se introduce en el cuerpo, tendrá capacidades hápticas, permitiendo al cirujano “sentir” los tejidos y órganos dentro del cuerpo del paciente, como ocurre durante la cirugía convencional.
Además, los investigadores desarrollarán gafas inteligentes que le permitirán al cirujano tener una visión clara y realista de lo que está sucediendo dentro del cuerpo mientras usa las citadas herramientas robóticas avanzadas.
Fuente: noticiasdelaciencia.com